Zeno, a human like robot from Robokind, used in our lab for early detection of Autism in children. It has 8 DOF arms and 6 DOF face. The arms used Dynamixel motors.
There is a Kinect with this robot that can detect Human skeleton and then imitate the subject. I used Labview with myRIO to interface with Kinect and Dynamixel actuators. Designed a custom power supply board to provide supply to myRIO, Dynamixels and head’s servo with protective measures.
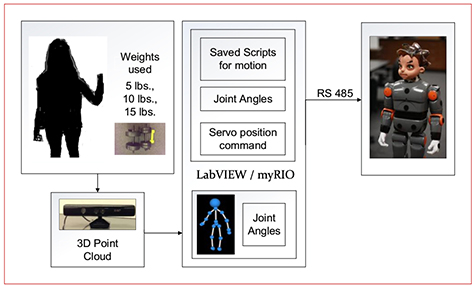
Figure:System Overview


Figure: User Interface on LabVIEW and myRIO with custom board
A video involving inverse kinematics for arms only can be seen here:
