The KUKA youBot is a research and educational mobile robot with a 5-DOF arm. It is an ideal platform to develop applications in service robotics.
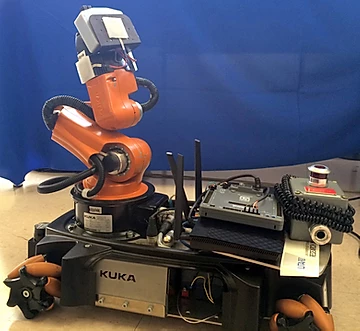
Figure: KUKA youBot
The system was fusioned with three IR sensors and four flexiforce sensors. IR sensors were connected to a custom designed hardware. All sensors were then connected to roboRIO, a FPGA hardware from National Instrument.
The sensor data was processed in the robot’s on-board linux machine that was running ROS (Robot Operating System). With all these we proposed a simple sensor based HMI framework that allows teleoperation along with basic levels of autonomous.
The publication can be found here and here. Or download the pdf from here and here.
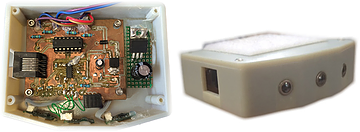
Figure: IR sensors with custom hardware and 3D printed case

Figure: Field of view of IR sensor
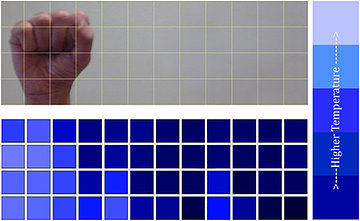
Figure: Heatmap generated based on IR sensors

Figure: Hardware Diagram